전북대학교 공학교육혁신센터의 지원을 받아 픽스호크 드론 제작 및 자율주행 교육을 받아왔다!

보다시피 아주! 빡빡한 일정이었지만 드론에 대해 정말 많은 것을 배울 수 있었던 소중한 시간이었다.
1/24 첫교육
첫날에는 4종 초경량비행장치 자격증 이론교육과 드론코딩 이론교육을 배웠다.쉽게 드론이 날아가는 역학 원리와 우리가 원하는 안정된 모션 제어를 위해 어떻게 드론의 FC 제어 입력을 주어야 하는지를 배울 수 있었다.
초경량비행장치 자격증은 필수교육과정 이수 후 하단 사이트에서 간단한 시험을 치르면 누구나 취득할 수 있다! https://edu.kotsa.or.kr/user/crse/CrseSeqUserList.do?_menuNo=226
드론은 4개 프로펠러의 추력을 이용해 비행한다. 따라서 양력을 이용하는 비행기에 비해 운용에는 많은 소모전력이 필요하다는 단점이 있지만 수직이착륙이 가능하고 더 많은 자유도의 이동이 가능한 것이 장점이다.또한드론을날릴때각날개의회전방향도중요하다.모두같은방향으로모터를구동하면뉴턴제3법칙에따른반토크발생하고모터회전방향반대방향으로드론이회전하는(yaw)현상이발생한다. 따라서 드론은 공중에서 고정시키고 싶다면 4개의 모터가 서로 같은 추력을 발생시키는 동시에 모터의 방향을 시계의 반시계를 섞어 잘 맞춰야 한다. 앞서 언급한 드론 모터의 세기를 적절히 조절하면 Yaw, Pitch, Roll에 대한 조작도 가능하다.

https://www.dronezon.com / learn – about – drones – quadcopters / how – a – quadcopter – works – with – propellers – and – motors – direction – design – explained /
1/25 두 번째 교육
본격적인 드론 조립 교육을 시작했다.강사분들의 도움을 많이 받아서 드론 프레임에 납땜을 하는 것부터 시작해서 모터, ESC, 텔레메트리 연결, GPS, 배터리와 PDB 보드에 픽스호크를 장착하는 것까지. 하루 만에 완료된 말로는 굉장히 짧았지만 실제로 굉장히 길고 복잡했다
특히 픽스 hawk에서는 접속이 복잡했는데, 어디에서 전원을 공급받아 전압을 얼마나 각 기기에 나누어 보내는지에 대한 개념만 확실해지면 극복 가능한 난관이라고 생각한다.

Ardupilot 참고로 위에 사진 가운데 보이는 픽스 hawk라는 건
픽스호크(Pixhawk)는 오픈소스인 드론 코드(Drone code)의 PX4(PX4FMUv2.x.)와 오픈소스인 Ardupilot의 Copter를 기반으로/지원하는 3DR사의 하드웨어(HW)이다.픽스호크는 기본 가이드, 개발 가이드, 펌웨어 기허브(Github)는 물론 회로도 및 JTAG 헤더가 설치되어 있으며 활발한 커뮤니티도 가지고 있다.픽스호크는 고정익기, 헬리콥터, 드론 등 비행컨트롤러(FC)의 역할을 지원하며, 다양한 RC카, 보트 등… 오픈소스의 특성상 많은 개발자들에 의해 수백 개의 패러밋(Parameter)이 만들어지기 때문에 제한 없이 원하는 플랫폼에 적용할 수 있다.http://www.dronestimes.net/news/articleView.html?idxno=1173라고 설명되어 있는데, 간단히 말하면 우리가 드론을 컨트롤하고자 할 때 준비한 알고리즘이 있을 것이다. 딥러닝으로 자세제어를 하든, PID로 자세제어를 하든, Pixhawk가 드론의 뇌가 되어 인풋에 대한 비행제어기 및 통신 프로토콜 역할을 한다.픽스 호크 펌웨어는 다음과 같은 github 에 오픈 소스로 공개되어 있으며 누구나 이용 가능하다.https://github.com/PX4/FirmwarePX4 Autopilot Software . Contribute to PX4 / PX4 – Autopilot development by creating an account on GitHub.github.com
그 후 조종기 펌웨어 Yaapu Telemetry와 Fc 펌웨어 Mission planner를 설치하고 캘리브레이션하는 과정을 배웠다.이에 대한 과정은 이전 포스팅에 저장해 두었으니 참고해 주세요.https://blog.naver.com/ehdud4520/222642776349https://ardupilot.org/planner/docs/common-downloads_firmware.html이후 받은 파일 압축 해제… blog.naver.com

https://www.youtube.com/ watch?v=kB5W8X93ZfQ상의 영상은 텔레메트리와 드론 사이의 연결을 진행하는 작업입니다. 도와주신 강사님 감사합니다. (웃음)
1/26, 세 번째 교육 셋째 날은 전날 만든 드론으로 보 모터를 장착하여 (캔을 떨어뜨리는 역할을 하려고) PID 튜닝에 대한 개념을 이해하고 직접 튜닝해 보는 시간을 가졌다. 원래 매뉴얼로 튜닝하면서 일일이 수정하는 방법도 좋은 방법이지만 시간이 걸려 어렵게 만든 드론이 파손될 우려가 있기 때문에 강사들의 비법을 전수받아 적절한 PID 튜닝게인을 입력했다. 이후 전북대 대운동장에 가서 실제로 매뉴얼 조종을 해보니 다행히 잘 작동했다!
뭔가 나중에 자식이 첫발을 내디뎠을 때처럼 떨렸다.납땜이 어땠는지 나사는 잘 조였는지 혹시 픽스호크선 연결은 잘못해서 쓰러지지 않을까..
https://youtu.be/2HI2-tvkwMc 드론이 처음 나오는 순간! 사실 잘못 날아서 넘어질까 봐 엄청 걱정했어. 잘 날아줘서 고마워 드론어 https://youtu.be/oa8FTkLDzZE 같은 반 친구들이 드론 조종을 굉장히 잘한다고 생각해. 대단해 1/26 마지막 교육
대망의 자율주행대회가 있었던 마지막 날!
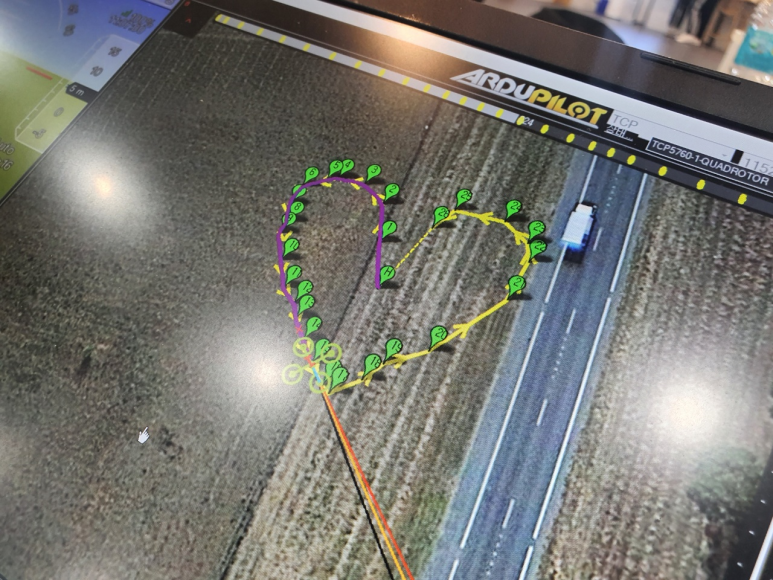
Mission planner의 Waypoint를 이용하여 GPS 기반의 자율주행 방법에 대해 배웠다.
경로점을 토대로 드론이 지정한 위치를 추적하며 자율주행을 진행했다. 생각보다 GPS 오차가 커 (2~3m) GPS만으로 드론을 자율주행하는 것은 무리라는 것을 느꼈고 나중에는 카메라, 라이더, 레이더 센서와 센서 융합을 통해 보다 정밀한 자율주행을 해보고 싶었다.

같은 반 친구들과 이런 판도 해봤어
https://www.youtube.com/watch?v=XOP3cBXb7d8 정해진 위치(코칼콘의 위치)를 지나가면서 둥근 원통에 캔을 떨어뜨려 가장 가까운 팀이 승리하는 미션이었다. 조가 미션 수행할 때 바람이 너무 불어서 깡통이 옆으로 꺾여서 아쉬운데? 1등은 못했어. ( ´ ; ω ; ` )

교육 끝나고 다 같이 찍은 모습! 얘들아 수고했어

드론으로 항공사진 촬영!
드론 조립부터 펌웨어 설치 및 튜닝 그리고 GPS 기반 자율주행까지 아주 좋은 경험이었어!열심히 해서 유능한 팀원을 만날 수 있어서 즐겁고 행복했다.