적외선 센서를 이용하여 장애물을 스스로 피하는 차를 친구들과 만들어 보았습니다!
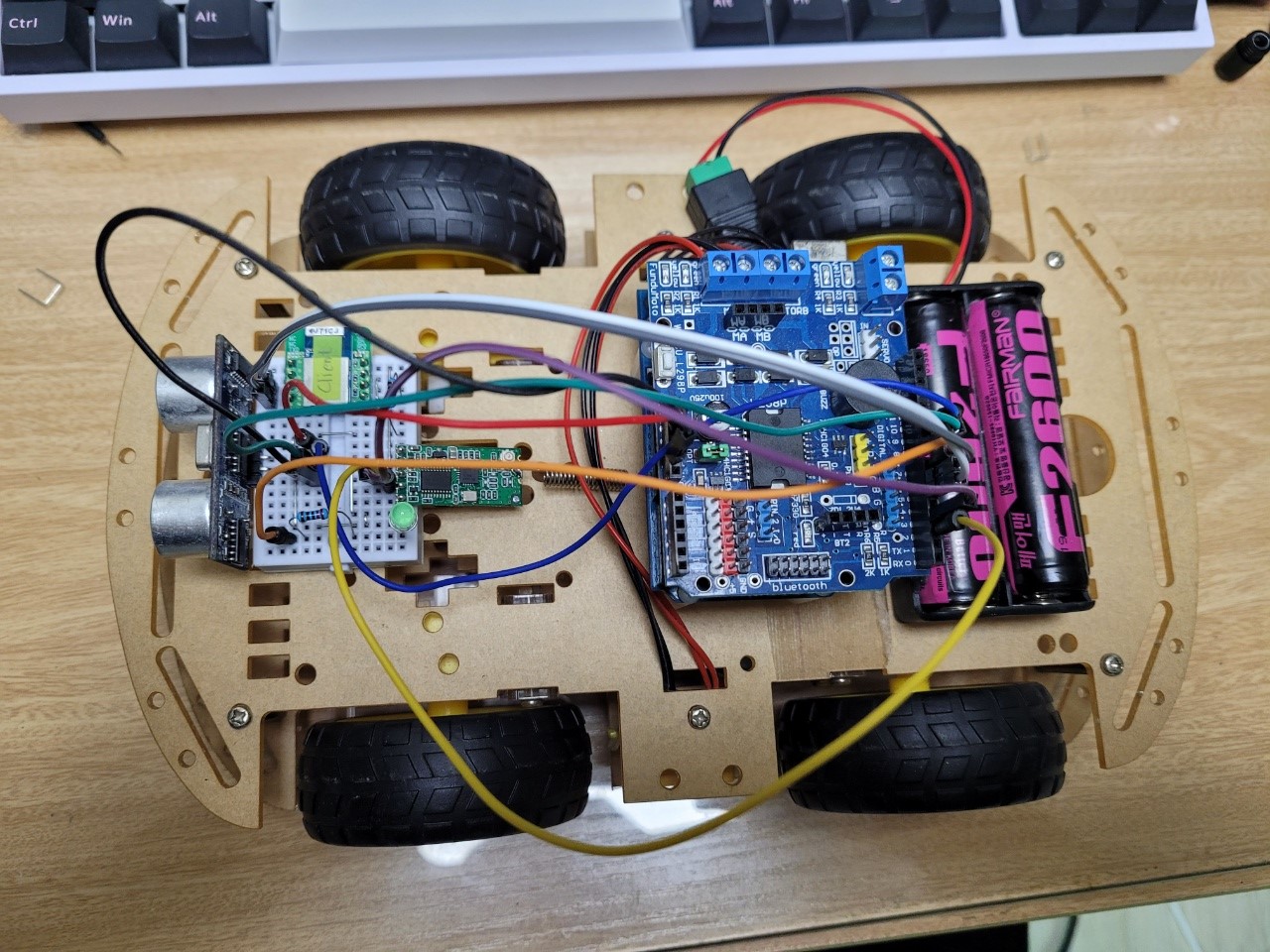
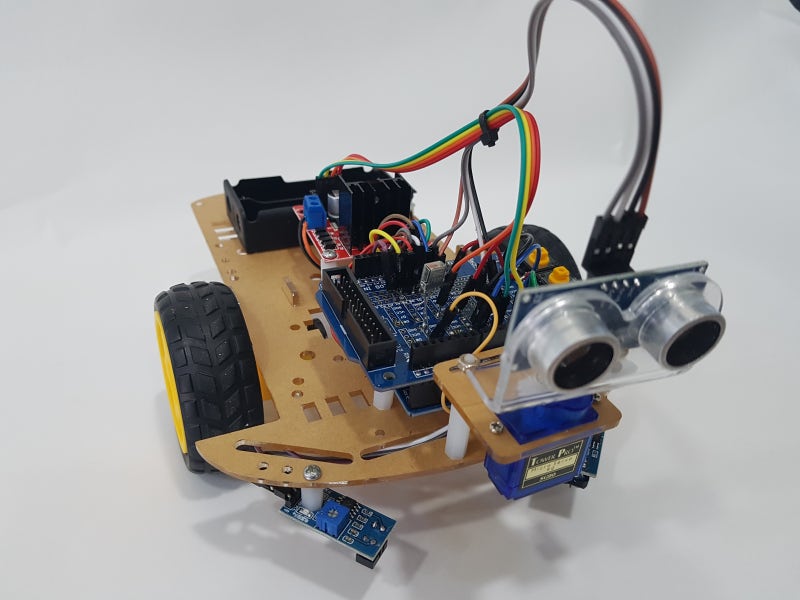
근접센서를 이렇게 아래쪽에 붙여준 이유는…
이런 햄스터봇 미로 찾기판을 사용하여 미로를 만들었습니다.이 장애물의 높이가 낮기 때문입니다.
따라서 중간에 차체가 높아져 센서가 장애물을 인지하지 못하면 제대로 작동하지 않습니다. (´;ω; ))
사실 더 목적지를 자주 방문한적도 많은데 그때마다 영상을 찍지 못해서…유감스럽게…
너무 쉬운 알고리즘으로 만든 거라서… 자율주행차라 이름 짓기가 좀 쑥스럽지만…간단한 코드로 자율주행차의 원리를 파악하는 데는 도움이 되고 싶어요!
연습하기에는 충분한 것 같은데.. 이번에는 제대로 된 벽으로 테스트 해보고 싶네요.
이제 마지막 수업을 앞두고 있어요.아쉽고 보고싶습니다.한 학기 내내 마스크를 쓰고 있어서 사실 얼굴도 제대로 모르는데 눈물샘이 강해진 것 같아요.
언제나처럼 이별이 다가오네요.항상 건강하고 이루고 싶은 모든 일이 이루어지길 응원합니다.