안녕하세요 여러분 저도 토비입니다!

오늘은 M.A.R.K를 가져왔습니다.
MARK는 자동차 형태로 설계되어 있으며, 모든 것이 연결되면 기본적으로 자율주행 자동차 기능을 구현할 수 있는 코드가 로드되는 로봇입니다! 정말 신기하죠?
짜잔! 오늘은 이 MARK를 조립해보려고 합니다~
M.A.R.K 언박싱!!


상자를 열어보면 주행연습을 할 수 있는 지도/가이드북/표지판 카드커버/MARKduino/헤드라이트보드/스피커 등 MARK를 조립할 수 있는 부품, 주행시 도움이 되는 재료로 구성되어 있습니다.
스펙은 아래 내용을 참고해주세요!크기 200(L)x185(W)x92(H)mm 무게(배터리포함 X) 약 620g 전원 공급 9-12VDC 또는 AA 배터리 6개 작동 전압 9-12V 메인보드 cyber Eye 카메라 모델 OV2640 LCD 디스플레이 DPI320x240
그러면 조립하러 가볼까요?
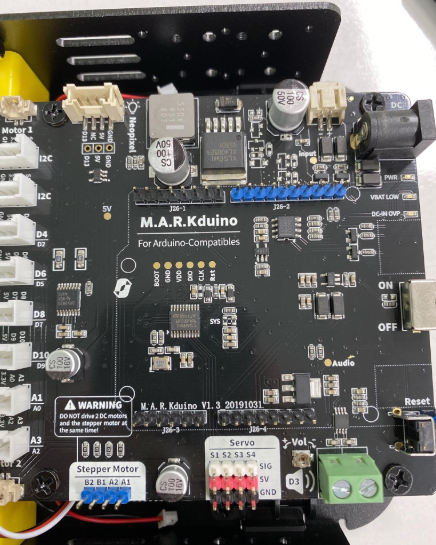
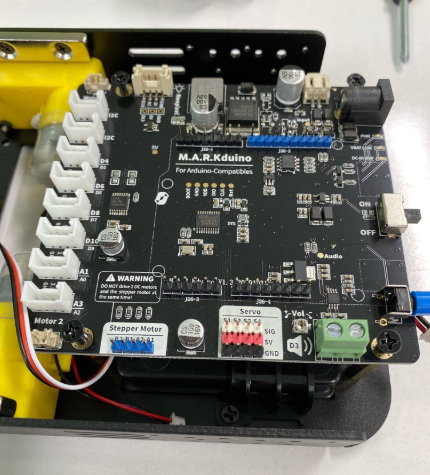
M.A.R.Kduino 조립 제일 먼저 본체와 아두이노를 결합시켜 줍니다!


아두이노 모서리에 나사 보이시나요?네 모서리에 나사를 넣어 돌립니다.
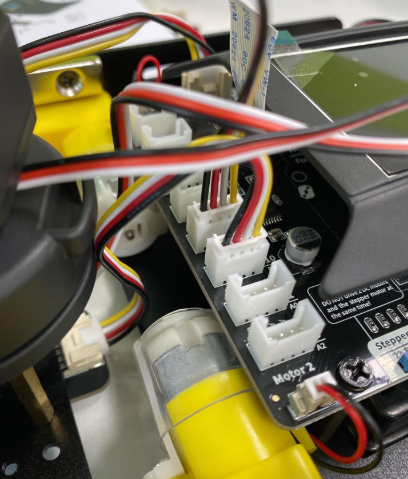
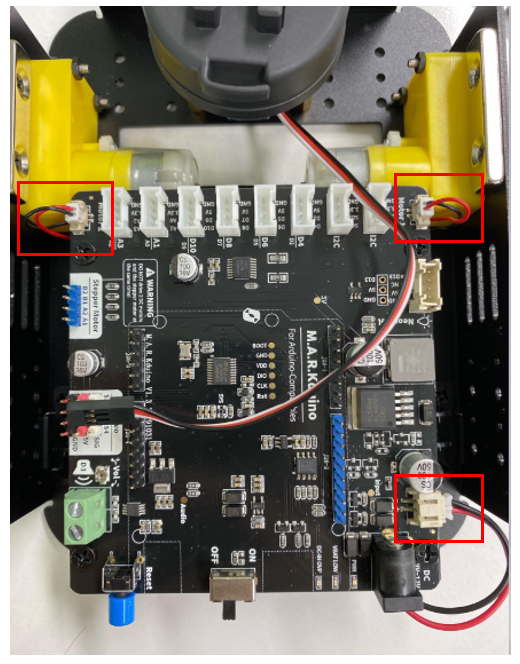
본체에 있던 모터 2개와 배터리 홀더를 연결합니다
헤드라이트 연결 제일 긴 헤드라이트를

본체의 앞부분이 되는 부분의 안쪽에 넣고 나사로 고정시킵니다.
10cm 글러브 케이블로 아두이노와 헤드라이트를 연결합니다
카메라 접속

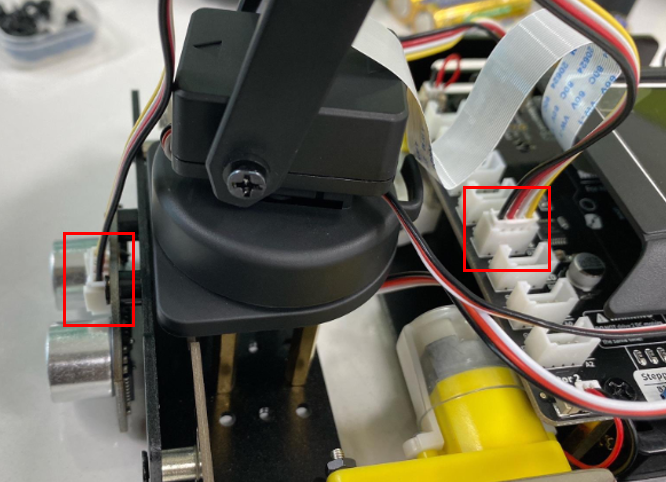
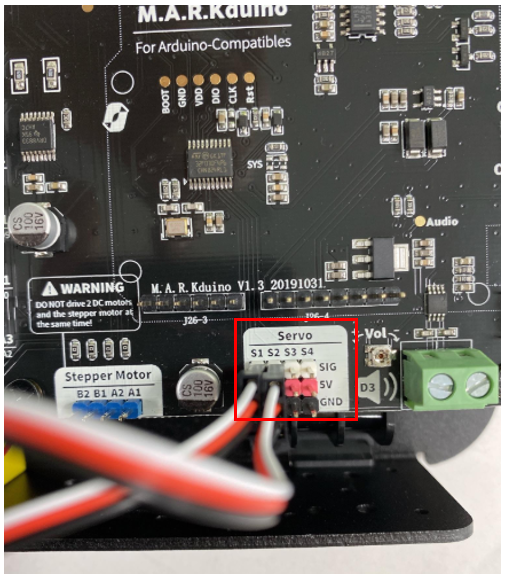
본체에 카메라를 끼워넣고 아두이노 ServoS1과 S2에 접속했습니다.이 때, S1에는 본체 케이블, S2에는 카메라 케이블을 접속해야 합니다.
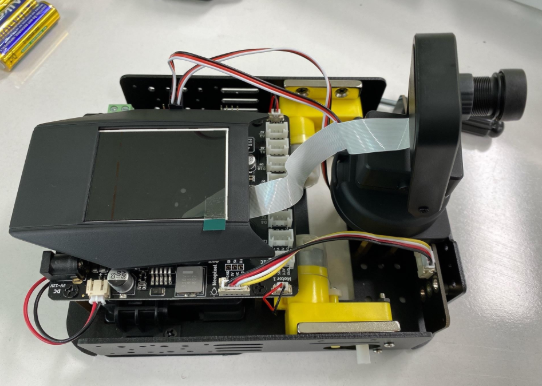
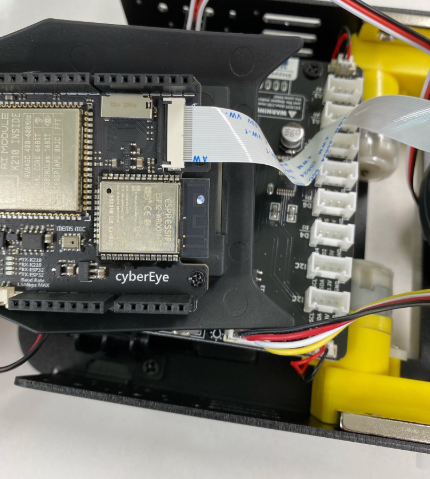
cyber Eye 접속

일단 카메라와 cyber Eye를 연결하겠습니다.

카메라와 연결된 cyberEye를 아두이노에 꽂습니다. cyberEye는 스크린이라고 보시면 되겠습니다.스피커 접속


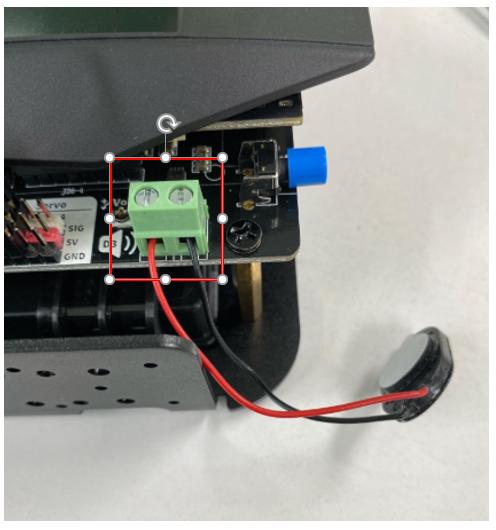
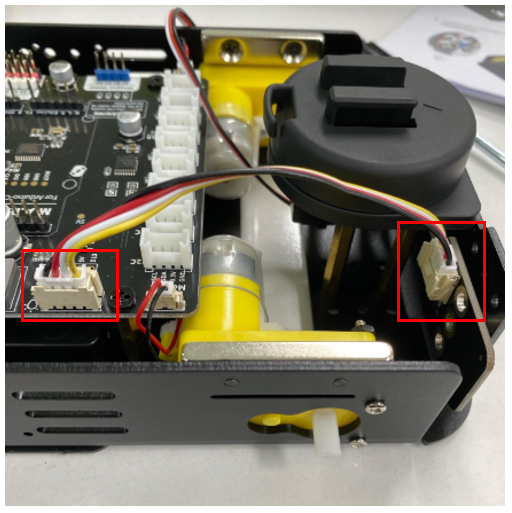
아두이노와 스피커를 연결하여 스피커를 본체 뒷면에 붙입니다.
볼륨 조절은 스크류 드라이버로 할 수 있어요.신기하죠?
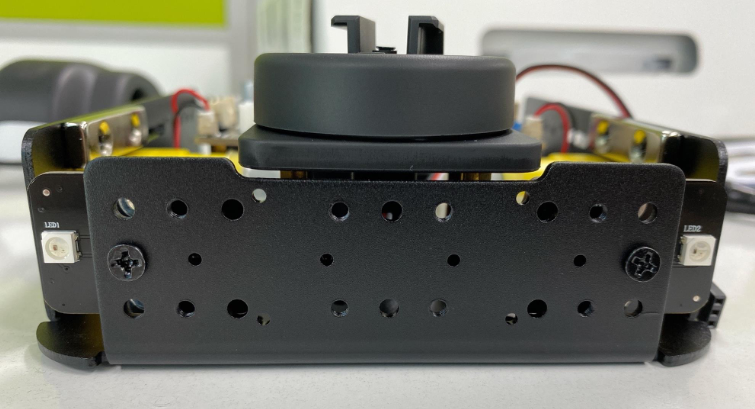
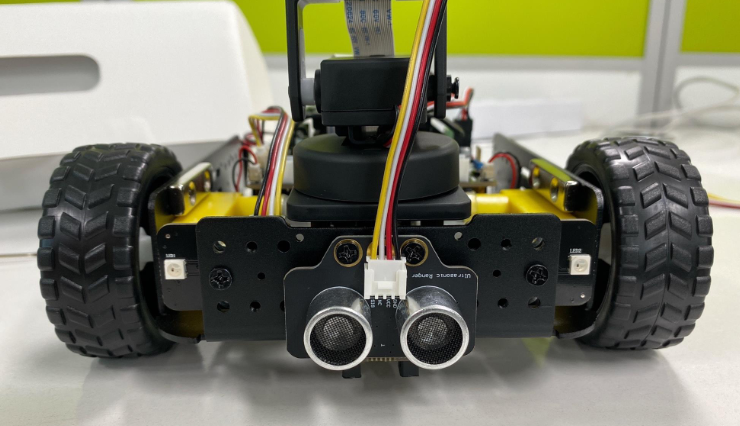
헤드 센서 접속

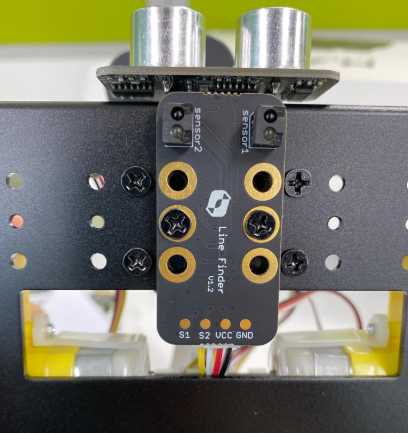
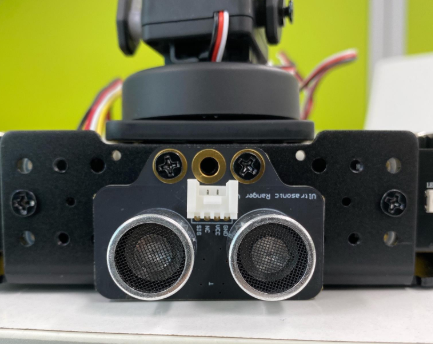
구성품에 센서가 2개 들어있어요하나는 초음파 센서, 다른 하나는 전자석입니다.사용하고 싶은 센서를 본체의 앞부분에 고정시킵니다.
저는 초음파 센서에 접속을 해드렸어요
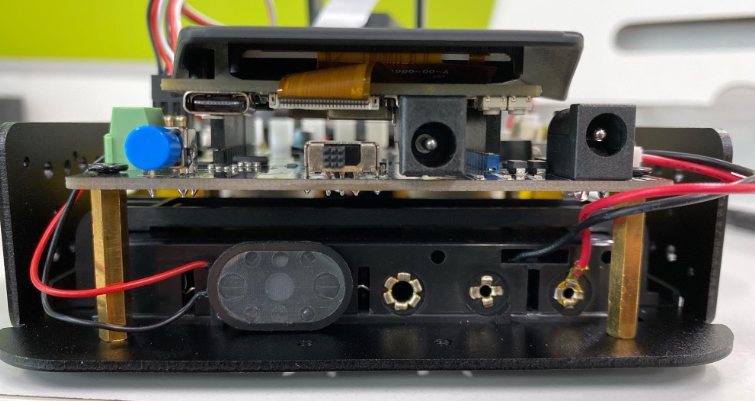
20cm 글로브 케이블로 초음파 센서와 아두이노를 연결합니다.
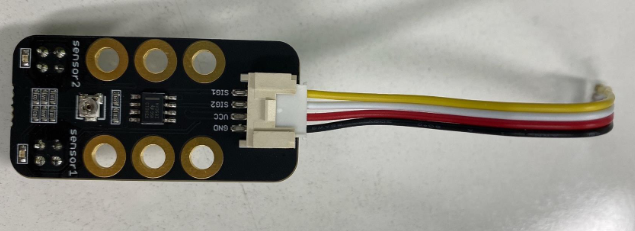
라인 트레이서 접속

라인 트레이서를 본체의 아래 부분에 나사로 고정시킵니다.이때 라이트 레이서와 본체가 어느 정도 떨어져 있어야 합니다.

10cm 케이블을 이용해서 아두이노랑도 연결합니다
마무리
뒷바퀴와 앞바퀴 2개를 연결합니다. 이제 거의 조립한 것 같죠?
본체 하부의 뚜껑을 열고 배터리를 넣습니다.선 정리하고 커버로 닫아주면 진짜 끝!
MARK 조립이 끝났습니다~!
오늘 MARK조립 해봤어요! 빨리 작동시켜보고 싶어서 몸이 근질근질해요.다음 시간에는 코드를 짜서 MARK구동 시켜보겠습니다!
다음 시간에 만나요 빠이빠이~~~