남쪽에 창문을 내요.(김삼영 시인, 1902~1951) 집을 짓는데 창문은 남쪽으로 낸다는 말이 인상적인 시입니다. 남향은 예나 지금이나 자연이나 도시나 거역할 수 없는 이치에 맞습니다. 안방과 거실은 해가 오래 걸리는 남쪽에 두고 부엌이나 창고는 북·서쪽에 두는 ‘배치’는 우리 생활 깊숙이 들어가 있습니다. 인공위성도 집 한 채를 지어 우주로 보내는 것과 비슷한데요. 골격을 만든 후 창문은 어디에 내놓을지, 각 방은 어떤 가구를 채워 어떤 용도로 쓰는지 모두 배치 설계를 통해 진행합니다. 극한 우주 환경에서 5년, 10년을 사용하는 인공위성의 내부 구조는 어떻게 되어 있는지 함께 살펴보겠습니다. 위성은 버스와 승객으로 구성된다
인공위성 본체는 사진 오른쪽 프레임을 포함해 복수의 서브시스템 일체를 버스(BUS)라고 부른다. <사진 출처=나무위키, NASA>
인공 위성의 내부 구조를 쉽게 이해하려면 버스나 버스를 타는 승객을 상상하면 좋겠습니다. 인공 위성에게도 마찬가지로 버스와 승객이 있습니다. “버스”는 위성의 본체의 일입니다. 승객을 태우기 위한 모든 시스템 하나입니다. 실제로 인공 위성 개발자도 위성 본체를 버스(Bus)라고 부르고 있습니다. 승객은 위성 탑재체(Payload)입니다. 통신·탐사·관측 임무 등을 수행하는 중요한 “고객”을 의미합니다. 탑재체는 비교적 분명합니다. 아리랑 3A호는 광학 카메라로 아리랑 5호는 합성 개구 레이더(SAR위성 개발 진 은 긴 “사-“로 발음합니다)입니다. 정지 궤도에 타고 있는 천리안 2A·2B호는 각각 기상, 환경/해양 탑재체에 해당합니다. 에도 위성 본체는 상당히 복잡한 거지만. 버스도 엔진, 바퀴, 핸들이 있듯이 인공 위성 본체에도 여러가지 서브 시스템이 있습니다. 인공 위성의 뼈대인 구조계, 전력원을 공급하는 전력계, 자세와 궤도를 담당하는 자세 조절기, 연료와 추력기 등의 추진계, 지상국과 데이터를 주고받는 원격 측정 및 명령계 위성을 적정 온도에서 관리하는 열 조절기 등입니다. 이들 컴포넌트가 각 방에서 역할을 다해야, 임무가 완성됩니다. 이 중에서 가장 기본은 구조 종류입니다. 간단히 말하면, 종횡 골격을 갖춘 프레임입니다. 그 모양을 결정하는 것은 손님입니다. 어느 유료 하중을 올리거나에 의해서 구조의 형상이 정해집니다. 경통이 있는 카메라를 올린 아리랑 위성이 환경 탑재체를 올린 천리안보다 더 긴 것이 이 때문이에요. 또, 유료 하중과 각종 서브 시스템을 장착 면마다 고정시키고 발사 하중과 진동, 충격에 견디도록 설계합니다.

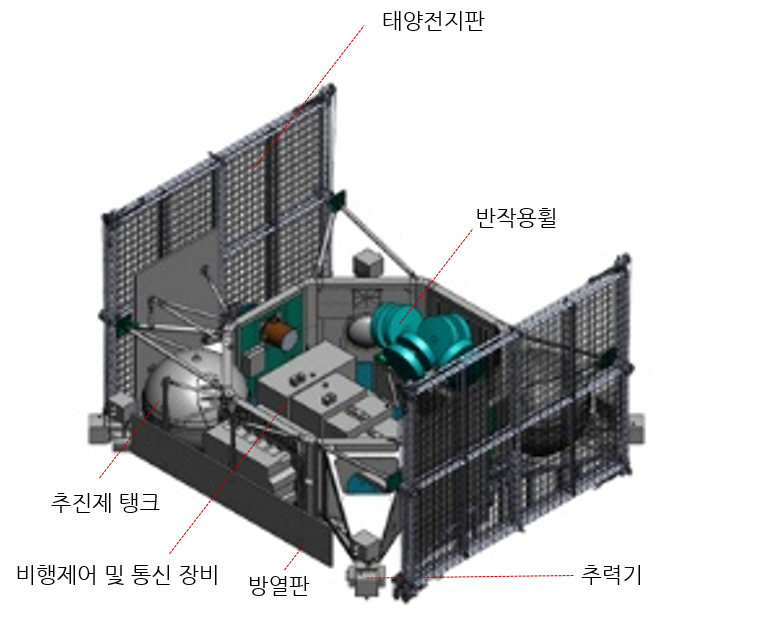
위성의 틀 내부는 각각의 이유에 따라 각종 서브시스템의 배치가 결정된다. <그림의 출처 = NPO Lavochkin >
손님 반대편에서 중심을 잡아주기도 하고

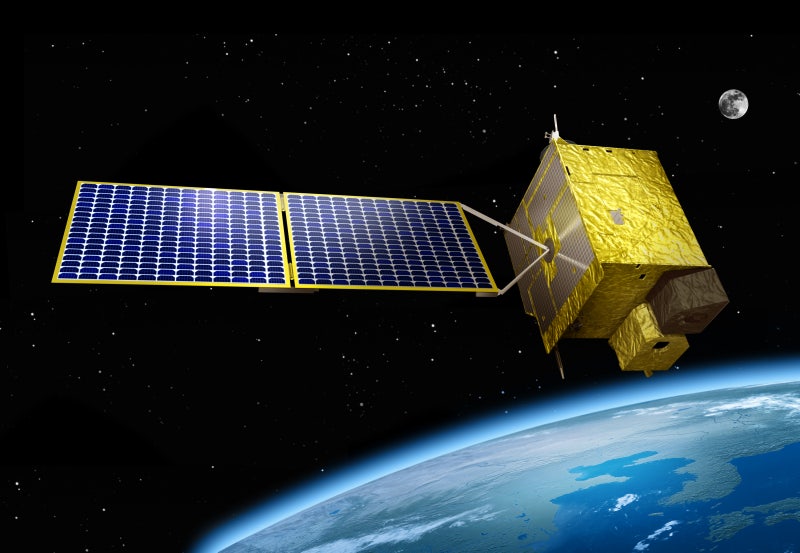
위성 임무를 수행하는 페이로드는 지구를 향하면 되지만 다른 서브시스템은 개별 역할에 따라 각각 배치 방향이 다르다. 그림 위에서 아리랑 3A호, 천리안 2A호, 아리랑 6호 상상도
%EB%9D%BC%EA%B3%A0_%EB%B6%80%EB%A5%B8%EB%8B%A4.png?type=w800)
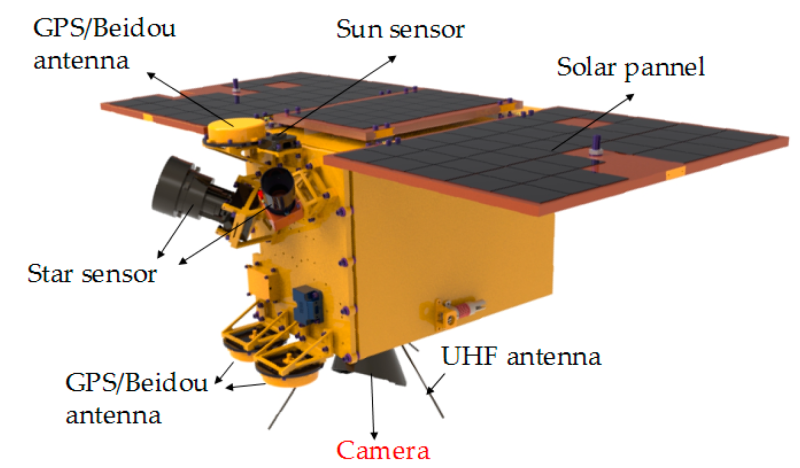
정해진 틀 속의 각 방마다 본체의 각종 서브 시스템을 어떻게 배치할지가 관건입니다. 탑재체는 남쪽으로 창을 내는 것만큼 방향이 뚜렷합니다. 광학 위성은 카메라의 눈이 걷으려는 방향을 정확히 바라봅니다. 천리안 같은 정지 궤도 위성도 기상 해양 환경을 24시간 감시하느라 항상 같은 장소에서 지구로 향합니다. 아리랑 5·6호 같은 SAR위성은 조금 다릅니다. 긴 평판 모양의 레이더가 지상에 전자파를 보내고 대상지의 전자기 반사 특성을 파악합니다. 직접 볼 게 아니라 건드린다는 표현에 가깝습니다. 그래서 기울기를 주고 땅을 위아래로 만집니다. 방향이 지구임은 틀림없을 것입니다. 내년에 우주로 날아가아리랑 6호는 특별한 임무 안테나가 하나 더 올릴 수 있습니다. 배가 보내는 신호 신호를 포착하는 선박 자동 식별(AIS)안테나입니다. SAR는 배를 찍고 AIS가 배의 위치를 식별하고 데이터를 비교하면, 그 배가 해적선인지를 단번에 알 수 있습니다. AIS안테나도 역시 지구를 향하죠.이처럼 유료 하중의 위치가 정해지면 그쪽에 무게와 무게가 쏠립니다. 인공 위성은 기울어져자세를 싫어합니다. 자세 제어 알고리즘도 복잡해지고 최대한 아껴야 할 연료가 더 많이 소비될 거에요. 우선 가장 중요한 손님이 정착하는 나머지 서브 시스템이 균형을 풀어 줍니다. 탑재체의 무게를 보상할 무거운 부품이 반대 측에 배치됩니다. 아리랑 5·6호 탑재체 SAR는 본체의 일면에 긴 평판장에 설치합니다. 거기서 반대 측에 배터리와 탑재 컴퓨터를 태우고 균형을 잡았어요. 이와 달리 광학용 위성은 반사 거울과 경통이 중간에 위치하여 사방에 균등하게 서브 시스템을 배치합니다. 천리안 위성의 경우는 기상, 환경 탑재체와 멀리 떨어뜨린 반대쪽에 발열량이 많은 통신 관련 부품을 장착했습니다. 이런 배치는 자세의 균형을 취하는 목적도 있지만, 탑재체에 열성적으로 영향을 주지 않기 위한 선택이기도 합니다. 센서는 방향도 배치도 가지각색
%EA%B3%BC_%EC%9E%90%EC%9D%B4%EB%A1%9C%EC%8A%A4%EC%BD%94%ED%94%84(%EC%95%84%EB%9E%98)%EB%8A%94_%EB%B0%A9%ED%96%A5%EC%84%B1%EC%9D%B4%EB%82%98_%EB%B6%80%EC%B0%A9_%EC%9C%84%EC%B9%98%EC%99%80_%EB%AC%B4%EA%B4%80%ED%95%98%EA%B2%8C_%EA%B8%B0%EB%8A%A5%ED%95%9C%EB%8B%A42.jpg?type=w800)
태양센서와 별센서 등은 각각의 역할에 따라 다른 방향을 향해 배치된다. <이미지 출처 = mdpi.com>
%EA%B3%BC_%EC%9E%90%EC%9D%B4%EB%A1%9C%EC%8A%A4%EC%BD%94%ED%94%84(%EC%95%84%EB%9E%98)%EB%8A%94_%EB%B0%A9%ED%96%A5%EC%84%B1%EC%9D%B4%EB%82%98_%EB%B6%80%EC%B0%A9_%EC%9C%84%EC%B9%98%EC%99%80_%EB%AC%B4%EA%B4%80%ED%95%98%EA%B2%8C_%EA%B8%B0%EB%8A%A5%ED%95%9C%EB%8B%A41.jpg?type=w800)
복수의 서브 시스템 중 배치에 가장 민감한 서브 시스템은 자세 제어입니다. 위성 스스로 우주의 어떤 좌표에 있는지, 유료 하중이 지구를 바라보고 있는지, 기울어지지 않는지, 궤도에서 벗어나고 있지 않은지 등을 시시각각으로 매우 정밀하게 확인해야 합니다. 이 때 필요한 것이 자세 제어용 센서와 구동기(추력기)입니다. 별 센서, 태양 센서, 관성 센서 등 센서마다 목표 방향이 다릅니다. 별 센서는 이름 그대로 별을 추적해야 합니다. 별이 아닌 지구나 태양을 바라보면 제 기능을 하지 않습니다. 센서에 내장된 “카탈로그 별”의 밝기와 위치 정보를 비교 연산해서 자세 정보를 파악합니다. 관성 센서 등과 달리 위치의 절대 값을 제공합니다. 옛날 항해사들이 북극성을 보고위치를 계산하던 것과 같은 방법입니다. 방향과 배치에 민감한 센서가 태양 센서입니다만, 태양열의 입사각을 측정합니다. 태양 전지판이 태양을 보지 않은 상태인지 여부를 판단하여 보다 효율적으로 전력을 얻기 위해서 입사각을 민감하게 탐사합니다. 자이로스코프에 대표되는 관성 센서는 꼬마에 비슷한 개념이어서 어떤 위치에 있어도 상관 없어요. 축(수평 유지)은 고정된 상태에서 코마가 돌아가며 변화하게 양을 가르칩니다. 이 변위각과 각속도에서 자세 제어를 합니다. 자세 제어 구동기의 하나인 반작용 휠은 통상 3개 이상 들어갑니다. 경사각을 확보할 수 있는 공간에 서로 가까이 배치하기로 제어 기능을 높일 수 있습니다.인공 위성의 반작용 휠이 궁금하다면 http://blog.naver.com/karipr/221934365939

반작용 휠(사진상)과 자이로스코프(아래)는 방향성이나 장착 위치에 관계없이 기능한다. <사진 출처=wordpress.mrreid.org / gyroscope.com>자기 센서는 다른 서브 시스템에서 멀리 떨어지고 있을 필요가 있습니다. 미리 알고 있는 지구 자기장 데이터와 실제 측정된 지구 자기장 데이터를 비교하고 위성의 자세를 결정합니다. 자기에 매우 민감한 것으로써 단독으로 놓아두면 영향을 받지 않고 역할을 합니다. 이와 유사한 센서가 마그네틱 톳카ー입니다. 총력을 기울이면 스스로 N, S극을 만듭니다. 인공 위성 3차원 축인 X, Y, Z축으로 1개씩 배치, 지구의 자력과 상호 작용하면서 약간의 자세를 보정합니다. 역시 다른 전장 부품은 거리를 두어야 하죠?이 밖에도 360도 전 방위 커버리지를 만들어 주는 서브 시스템이 있습니다. 지상국과 데이터를 주고받는 원격 측정 및 명령계(TC&R)안테나입니다. 지구 측과 반대 측에도 안테나를 하나 더 배치하고 자세 제어할 수 없는 긴급 상황에서도 임무를 수행할 수 있는 비결입니다. 추진 장치의 회전기는 궤도 조정할 때 주로 사용합니다. 위성이 날아가는 반대 방향으로 달아 로켓처럼 반작용 추력을 냅니다. 배출 가스가 태양 전지 패널 등을 때려서는 안 되는 부분에 두는 것이 중요합니다. 이처럼 꼭 필요한 방향과 위치에 정교한 배치 설계를 하면서도, 한가지 고려해야 하는 것이 전선(다 니스)이 복잡하게 뒤틀리지 않도록 하는 것입니다. “옥에서 말이라도 꿰어야 보배”라는 격언은 인공 위성의 것이라고 생각합니다.기획 제작 항공 우주 Editor이 정원 내용 감수:다목적 실용 위성 6호 사업단 문·홍 욜 박사자기 센서는 다른 서브시스템에서 멀리 떨어져 있어야 합니다. 미리 알고 있는 지구 자기장 데이터와 실제로 측정된 지구 자기장 데이터를 비교하여 위성의 자세를 결정해 줍니다. 자력에 매우 민감하기 때문에 단독으로 두면 영향을 받지 않고 제 역할을 할 수 있습니다. 이와 비슷한 센서가 마그네틱 토커입니다. 전력을 다하면 스스로 N, S극을 만듭니다. 인공위성의 3차원 축인 X, Y, Z축에 하나씩 배치, 지구 자력과 상호작용하면서 약간의 자세 보정을 해줍니다. 아무래도 다른 전장부품과는 거리를 둬야겠죠?이외에도 360° 전방위 커버리지를 만들어주는 서브시스템이 있습니다. 지상국과 데이터를 주고받는 원격 측정 및 명령계(TC&R) 안테나입니다. 지구 측과 반대편에도 안테나를 하나 더 배치해 자세 제어가 안 되는 긴급 상황에서도 임무를 수행할 수 있는 비결입니다. 추진계 추력기는 궤도 조정을 할 때 주로 사용합니다. 위성이 나는 반대 방향으로 설치해 로켓처럼 반작용 추력을 냅니다. 배출가스가 태양전지 패널 등을 쳐서는 안 되는 곳에 두는 것이 중요합니다. 이렇게 꼭 필요한 방향과 위치에 정교한 배치 설계를 하면서도 또 하나 고려해야 할 것이 전선(하니스)이 복잡하게 꼬이지 않도록 하는 것입니다. 구슬부터 말이라도 통해야 보물이라는 속담은 인공위성을 말하는 것 같습니다.기획제작 : 항공우주 Editor 이종원 내용 감수 : 다목적실용위성 6호 사업단 문홍열 박사